|
Практика 7. Построение компьютерной модели динамической системы «Умный дом» и ее расчет
|
|
|
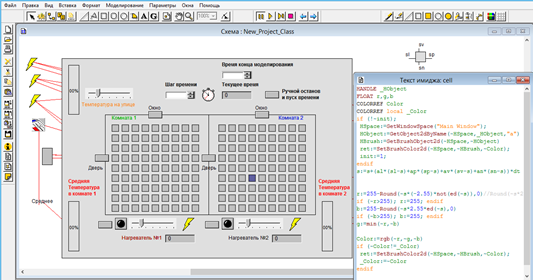
| Рисунок - Пример схемы модели умного дома, собранной в среде моделирования Stratum-2000 |

На скриншоте видны инструменты среды, схема и окно имиджа с уравнением теплопроводности в одной из комнат в форме Эйлера (режим проектирования).
|
|
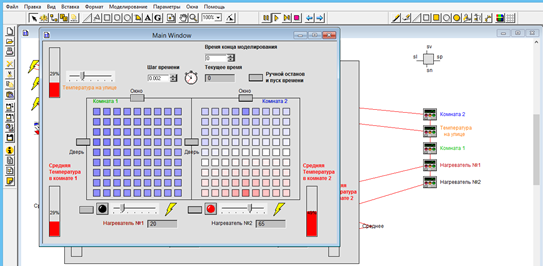
| Рисунок - Пример работы модели (режим моделирования) |

На скриншоте видны расчетные траектории, отражающие температуру различных частей дома осциллографами среды.
Ниже приведена схема и ее работа в процессе моделирования для более продвинутой модели дома в виде системы с распределенными параметрами.
Здесь дом разбит на множество фрагментов (миникомнат), соединенных между собой, позволяющих смоделировать распределение температурного поля по частям дома.
|
|
| Рисунок - Схема дома как системы с распределенными параметрами |
В отдельном окне видна модель отдельного фрагмента в виде уравнения Эйлера.
|
|
| Рисунок – Работа модели системы с распределенными параметрами |
Видно распределение температурного поля дома в зависимости от краевых условий в виде цветовых пятен.
Каждый имидж схемы дома показывает свое состояние цветом (синий – холодный, красный - теплый).
12. «Построение модели системы регулирования»
Соберите релейный, П-регулятор, ПИ-регулятор и ПИД-регулятор для регулировки температурного режима дома в автоматическом режиме.
Спроектируйте пульт для изменения температуры окружающей среды, положения окон и дверей, включения приборов. Приветствуется технология Drag&Drop.
Спроектируйте систему отображения (наглядно, в аналоговом и цифровом виде, с графиками) изменения температур в комнатах, изменения положения окон, дверей.
Объясните поведение системы при действии на нее определенного типа регулятора (4 типа). Объясните разницу поведений объекта под действием различных типов регуляторов, сформулируйте их достоинства и недостатки.
Объясните поведение системы при действии на нее нескольких регуляторов.
Теория
Различают три типа воздействий на объект: регулирование, управление и организация. Самым простейшим способом добиться от объекта желаемого поведения (но не всегда!) является регулирование.
Регулятор – система, позволяющая поддерживать заданный пользователем уровень выбранной для регулирования переменной в рамках его настроек и отведенных ему для этого ресурсов. Характерной чертой его действия на регулируемый объект является возврат объекта на плановую траекторию даже в том случае, если объект под действием неожиданных помех со стороны среды сошел с нее.
|
|
| Рисунок – Работа регулятора. Отклонение реальной траектории объекта от плановой в следствии действия помех на объект во время работы. Возвращение реальной траектории (красная линия) движения объекта на плановую траекторию (синяя линия) регулятором |

12.1. Простейшим регулятором является релейный регулятор.
Допустим пользователь задал плановую температуру в комнате Тп=20 град. Реально в комнате Тр=5 град. Регулятор (реле), видя, что Тр<Тп, включает нагреватель (исполнительный механизм, клапан, вентиль). Данное действие приводит к тому, что комната начинает нагреваться, что отразится на кривых, рассчитывающих температуру комнаты.
Данная ситуация (реле включено) будет продолжаться до тех пор, пока (Тр<Тп). Как только температура в комнате в результате воздействия на нее включенного с помощью реле нагревателя станет больше заданной пользователем плановой комфортной температуры (Тр>Тп), реле отключится. Это приведет к тому, что нагреватель перестанет действовать на комнату. В свою очередь это может привести к тому, что температура в комнате начнет падать. По мере ее падения снова возникнет ситуация (Тр<Тп) и реле снова включит нагреватель. Комната снова нагреется.
Таким образом, реле «поддерживает» температуру в комнате около ее комфортного значения, включаясь или отключаясь в подходящие моменты времени.
Если температуры включения реле и температура отключения реле совпадают, то в ситуации, когда Тр ≈ Тп, реле начнет «быстро» включаться и тут же выключаться. Поэтому, чтобы реле в окрестности (Тр=Тп) не «трещало», между температурой включения реле и температурой отключения реле оставляют зазор величиной Е.
Смоделируйте на модели дома релейный регулятор, поддерживающий заданную пользователем температуру в доме.
Настройте регулятор, подберите лучшее значение Е.
Спроектируйте виртуальный пульт для установки пользователем планового значения комфортной температуры в доме Тп по его выбору.
Снимите графики изменения температуры в доме при работе релейного регулятора в различных условиях.
Приведите графики и схемы в отчете.
Сделайте вывод (достоинства и недостатки релейного регулятора).
12.2. Чтобы избавиться от недостатков релейного регулятора, используют более продвинутый пропорциональный регулятор (П-регулятор).
Смысл его работы в том, что он измеряет разницу между реально достигнутой температурой Тр и плановым Тп ее значением Е=(Тп-Тр), которая называется ошибкой, рассогласованием. Но приоткрывает клапан (вентиль) исполнительного механизма не полностью на величину Е, а только на соответствующую его долю: Z=К*(Тп-Тр), тем не менее позволяя нагревать комнату.
Коэффициент К – коэффициент регулятора, ответственный за скорость исполнения приказа регулятора.
|
|
| Рисунок – Схема П-регулятора |
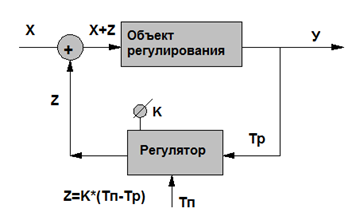
Если Тп>>Тр, то в переменной Z формируется значительное число К*(Тп-Тр)>>0, что осуществляет значительное воздействие на температуру комнаты.
По мере того, как реальная температура комнаты Тр приближается к плановой Тп, разница (Тп-Тр) уменьшается и клапан регулятора, оставаясь открытым, уменьшает свое воздействие на регулируемый объект. Это позволяет плавно подойти значению температуры Тр к значению температуры Тп, а в случае Тп=Тр и вовсе остановиться в своем дополнительном воздействии на объект регулирования, сделав его равным нулю.
Смоделируйте на модели дома П-регулятор, поддерживающий заданную пользователем температуру в доме.
Настройте П-регулятор - экспериментируя, подберите лучшее значение коэффициента регулирования К.
Спроектируйте виртуальный пульт для установки пользователем планового значения комфортной температуры в доме Тп по его выбору.
Снимите графики изменения температуры в доме при работе П-регулятора в различных условиях.
Приведите графики и схемы в отчете.
Сделайте вывод (достоинства и недостатки П-регулятора).
12.3. По мере того как Вы изучаете поведение П-регулятора в разных условиях, становятся ясны его недостатки. Чтобы избавиться от них, используют следующий тип регуляторов – пропорционально-интегральный регулятор (ПИ-регулятор).
Измените формулу регулятора: Z=K1*(Тп-Тр)+К2*U, дополнив его слагаемым K2*U, накапливающим во времени (интегрирующим) постоянно меняющуюся ошибку (Тп-Тр):
U=∫(Тп-Тр)dt.
К1 – коэффициент, учитывающий силу пропорциональной части регулятора, К2 – коэффициент, учитывающий силу интегрального слагаемого регулятора.
Запишите уравнение ПИ-регулятора в разностном виде (формула Эйлера).
Такой регулятор способен «дожать» регулирующее воздействие Z так, чтобы компенсировать постоянно действующие помехи со стороны среды Х на объект регулирования и заставить его даже в этих условиях достичь значения Тп.
Смоделируйте на модели дома ПИ-регулятор, поддерживающий заданную пользователем температуру в доме.
Настройте ПИ-регулятор - экспериментируя, подберите лучшие значения коэффициентов регулирования К1 и К2.
Спроектируйте виртуальный пульт для установки пользователем планового значения комфортной температуры в доме Тп по его выбору.
Снимите графики изменения температуры в доме при работе ПИ-регулятора в различных условиях.
Приведите графики и схемы в отчете.
Сделайте вывод (достоинства и недостатки ПИ-регулятора).
12.4.1. Если добавить в выражение ПИ-регулятора дифференцирующее слагаемое, то можно еще улучшить работу регулятора, который в этом случае называется ПИД-регулятором.
Измените формулу регулятора: Z=K1*(Тп-Тр)+К2*∫(Тп-Тр)dt+К3*d(Тп-Тр)/dt. Запишите его в разностном виде (формула Эйлера).
Такой регулятор также способен «дожать» регулирующее воздействие Z таким образом, чтобы компенсировать постоянные помехи со стороны среды Х на объект регулирования и заставить его даже в этих условиях достичь значения Тп, но при этом улучшает его скоростные характеристики при правильном подборе коэффициентов K1, K2, K3.
Смоделируйте на модели дома ПИД-регулятор, поддерживающий заданную пользователем температуру в доме.
Настройте ПИД-регулятор - экспериментируя, подберите лучшие значения коэффициентов регулирования К1, К2 и К3.
Спроектируйте виртуальный пульт для установки пользователем планового значения комфортной температуры в доме Тп по его выбору.
Снимите графики изменения температуры в доме при работе ПИД-регулятора в различных условиях.
Приведите графики и схемы в отчете.
Сделайте вывод (достоинства и недостатки ПИД- регулятора).
Примечание: постарайтесь собрать все схемы регулирования в одном проекте. Сделайте удобный переключатель регуляторов на виртуальном пульте пользователя для демонстрации их работы, предусмотрите поле для их настройки.
Заключение: уравнения ПИД-регулятора являются частным случаем формулы морфинга и постоянно используются в инженерной деятельности. Например, регулирование технологических процессов в производстве, парковка мыши и окон в программных продуктах при воздействии на них пользователей, реалистичное поведение динамических объектов в компьютерных моделях и так далее.
Задание к экзамену: посмотрите, используя эксперимент на модели, как поведет себя объект, если в доме несколько комнат, в каждой из которых стоит свой регулятор, и открыты двери между комнатами и на улицу, где холодно. Как спроектировать совместное разумное действие регуляторов на объект в целом?
| О руководителе курса «Моделирование систем» | Лекция 02. Линейные регрессионные модели | ||||||||||||||||
|
|||||||||||||||||