RotateObjectPoints3d
Синтаксис
FLOAT RotateObjectPoints3d(HANDLE HSpace3d, HANDLE HObject3d, FLOAT Matrix, FLOAT Angle)
Описание
Параметры
HSpace3d дескриптор трехмерного пространства
HObject3d дескриптор проекции трехмерного пространства
Matrix номер матрицы
Возвращаемое значение
Возвращается результат выполнения этой операции.
Примечание
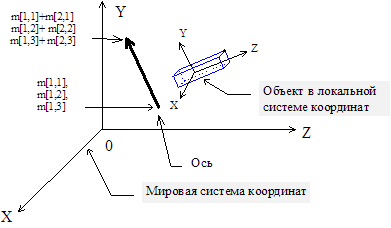
Матрица, задающая ось поворота, должна иметь размер (2*3).
X Y Z Координаты вектора
dX dY dZ Направление оси
Пример
// Реализация функции _RotateObjectPoints3d из системной библиотеки
function
HANDLE PARAMETER hSpace3d,hObject
FLOAT PARAMETER ax,ay,az,angle
if(hSpace3d && hObject)
matrix:=mcreateMCreate (0,1,2,1,3,1)
rez:=MputMPut (matrix,2,1,Ax,1)
rez:=Mput(matrix,2,2,Ay,1)
rez:=Mput(matrix,2,3,Az,1)
rez:=RotateObjectPoints3d(hSpace3d,hObject,matrix,angle)
rez:=MDeleteMDelete (matrix,1)
endif
return rez
Created with the Personal Edition of HelpNDoc: Easy to use tool to create HTML Help files and Help web sites